

行业资讯
机械手的设计方案
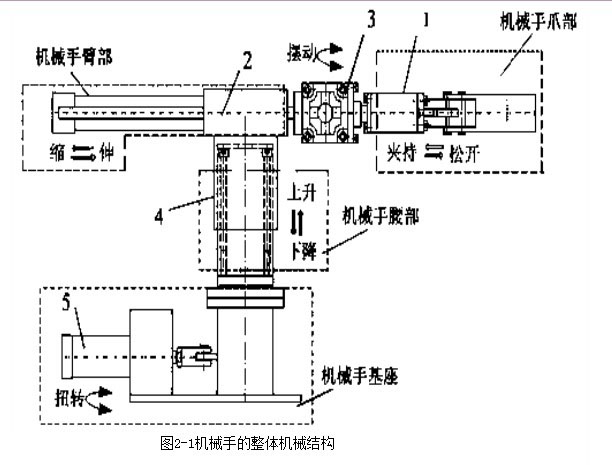
对液压机械手的基本要求是能快速、准确地拾-放和搬运物件,这就要求它们具有高精度、快速反应、一定的承载能力、足够的工作空间和灵活的自由度及在任意位置都能自动定位等特性。设计液压机械手的原则是:充分分析作业对象(工件)的作业技术要求,拟定合理的作业工序和工艺,并满足系统功能要求和环境条件;明确工件的结构形状和材料特性,定位精度要求,抓取、搬运时的受力特性、尺寸和质量参数等,从而进一步确定对机械手结构及运行控制的要求;尽量选用定型的标准组件,简化设计制造过程,兼顾通用性和专用性,并能实现柔性转换和编程控制.本次设计的机械手是通用液压上下料机械手(如图2-1所示),是一种适合于成批或中、小批生产的、可以改变动作程序的自动搬运或操作设备,动作强度大和操作单调频繁的生产场合。它可用于操作环境恶劣的场合。
2.1 机械手的座标型式与自由度
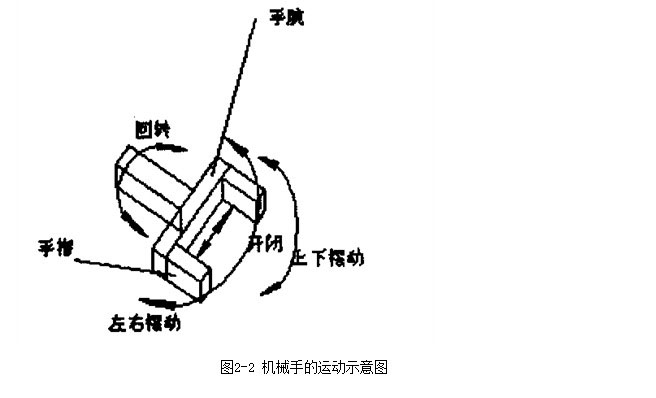
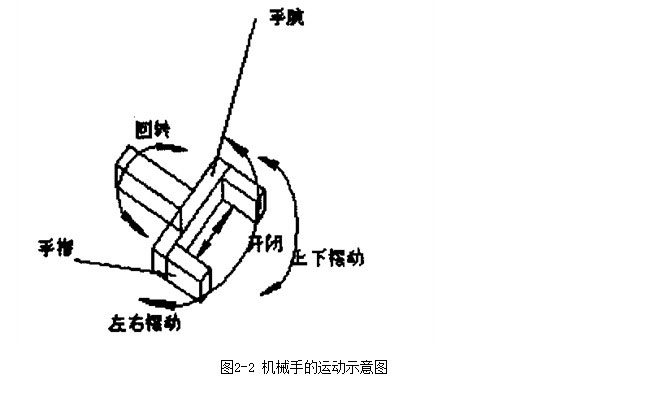
按机械手手臂的不同运动形式及其组合情况,其座标型式可分为直角座标式、圆柱座标式、球座标式和关节式。由于本机械手在上下料时手臂具有升降、收缩及回转运动,因此,采用圆柱座标型式。相应的机械手具有三个自由度,为了弥补升降运动行程较小的缺点,增加手臂摆动机构,从而增加一个手臂上下摆动的自由度。(如图2-2所示)
2.2 机械手的手部结构方案设计
为了使机械手的通用性更强,把机械手的手部结构设计成可更换结构,当工件是棒料时,使用夹持式手部;当工件是板料时,使用气流负压式吸盘。
2.3 机械手的手腕结构方案设计
考虑到机械手的通用性,同时由于被抓取工件是水平放置,因此手腕必须设有回转运动才可满足工作的要求。因此,手腕设计成回转结构,实现手腕回转运动的机构为回转液压缸。
2.4 机械手的手臂结构方案设计
按照抓取工件的要求,本机械手的手臂有三个自由度,即手臂的伸缩、左右回转和降(或俯仰)运动。手臂的回转和升降运动是通过立柱来实现的,立柱的横向移动即为手臂的横移。手臂的各种运动由液压缸来实现。
2.5 机械手的驱动方案设计
由于液压传动系统的动作迅速,反应灵敏,阻力损失和泄漏较小,成本低廉因此本机械手采用液压传动方式。
2.6 机械手的控制方案设计
考虑到机械手的通用性,同时使用点位控制,因此我们采用可编程序控制器(PLC)对机械手进行控制。当机械手的动作流程改变时,只需改变PLC程序即可实现,非常方便快捷。
2.7 机械手的主要技术参数
一.机械手的大抓重是其规格的主参数,由于是采用液压方式驱动,因此考虑抓取的物体不应该太重,查阅相关机械手的设计参数,结合工业生产的实际情况,本设计设计抓取的工件质量为5公斤。
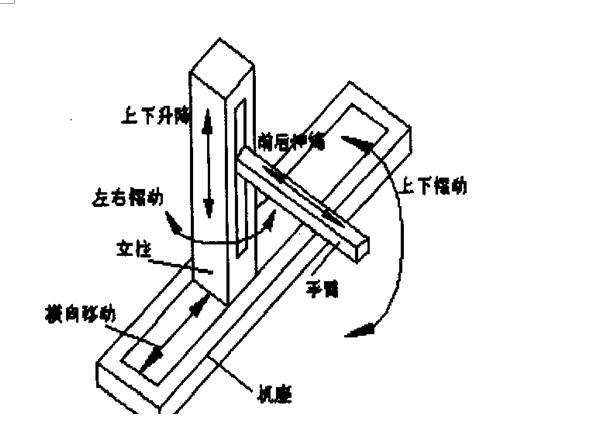
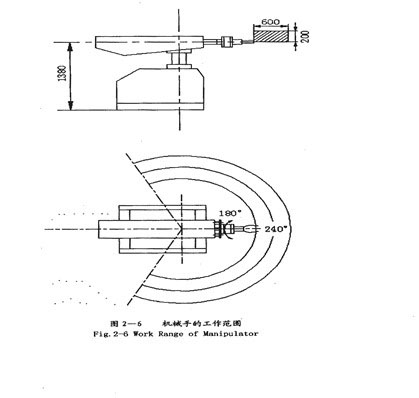
二.基本参数运动速度是机械手主要的基本参数。操作节拍对机械手速度提出了要求,设计速度过低限制了它的使用范围。(如图2-3所示)而影响机械手动作快慢的主要因素是手臂伸缩及回转的速度。该机械手大移动速度设计为。大回转速度设计为。平均移动速度为。平均回转速度为。机械手动作时有启动、停止过程的加、减速度存在,用速度一行程曲线来说明速度特性较为全面,因为平均速度与行程有关,故用平均速度表示速度的快慢更为符合速度特性。除了运动速度以外,手臂设计的基本参数还有伸缩行程和工作半径。大部分机械手设计成相当于人工坐着或站着且略有走动操作的空间。过大的伸缩行程和工作半径,必然带来偏重力矩增大而刚性降低。在这种情况下宜采用自动传送装置为好。根据统计和比较,该机械手手臂的伸缩行程定为600mm,大工作半径约为。手臂升降行程定为。定位精度也是基本参数之一。该机械手的定位精度为。
三. 用途:
用于自动输送线的上下料。
四.设计技术参数:
所属类别: 行业资讯
